
Como ya hemos explicado en un post anterior “Cómo crear tu propio brazo robótico“, y ahora hablaremos de cómo se diseñan estas referencias de Denavit-Hartenberg con una serie de instrucciones paso por paso.
Para verlo expondremos un ejemplo aplicado y al final lo podremos ver representado en una escena en donde podremos visualizar sus movimientos.
Los pasos a seguir son:
- Elección de referencias para cada articulación.
- Obtención de los parámetros de Denavit-Hartenberg.
- Crear una tabla e introducción de datos en el modo de visualización.
- Introducir giros para establecer la posición inicial.
El ejemplo es un robot Puma 560, (Programmable Universal Machine for Assembly, or Programmable Universal Manipulation Arm), desarrollado por General Motors y que es uno de los brazos robóticos más utilizados en el mundo académico. Hay que decir que ya es bastante viejo.
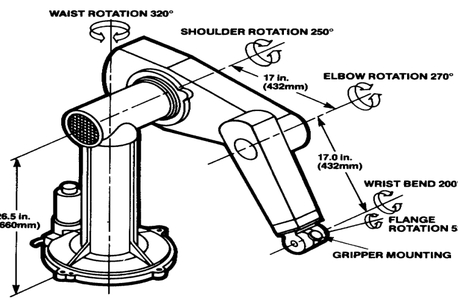
Este manipulador tiene 5 grados de libertad, que son 5 articulaciones rotacionales indicadas en la figura. La primera es de rotación sobre la base para girar todo el brazo. Las dos siguientes se encuentran sobre los brazos como giro de flexión-extensión a modo de hombro y codo. Y las dos últimas se encuentran alojadas en el efector final (que es el lugar que corresponde a la muñeca).
- Elección de referencias para cada articulación.
Comenzamos estableciendo una base fija o eslabón 0 que será la base desde la que se mueve nuestro sistema. Lo normal es escoger el eje z_0 en la vertical y los otros dos (x_0, y_0) perpendiculares entre ellos.
El resto de ejes z se dispondrán en la dirección de giro de cada articulación, como aparece en la siguiente figura.

El resultado se puede visualizar en el siguiente Link.
One comment