PID Temperature Control with Arduino
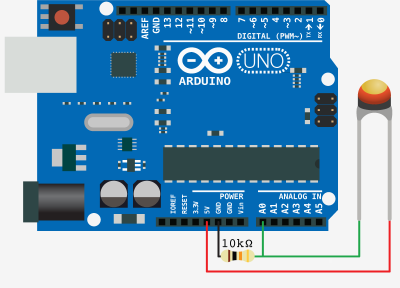
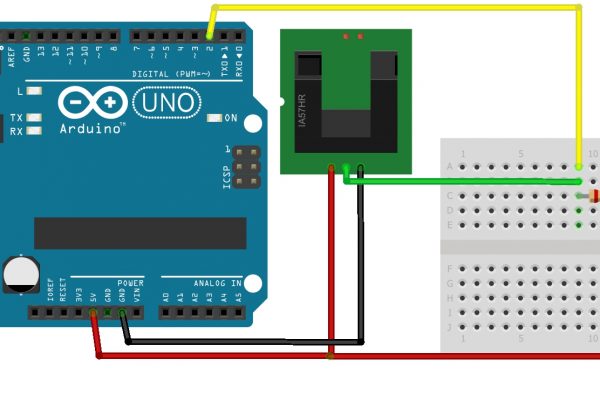
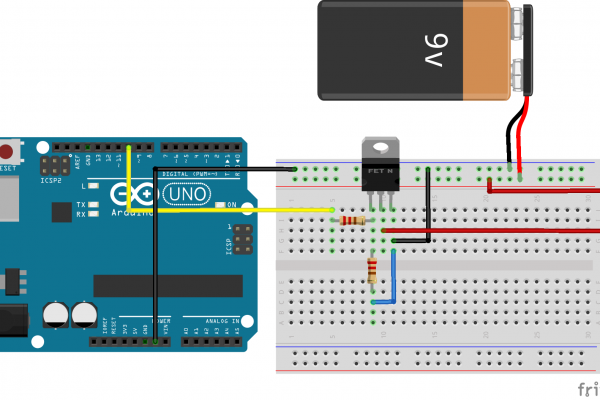
Con el ejercicio anterior hemos podido desarrollar las lecturas de un termistor para crear un elemento de control PID sobre un actuador. Para ello, vamos a desarrollar el circuito que vamos a implementar para el actuador con un MOSFET y para conseguirlo vamos a aplicar el siguiente esquema. La resistencia de 10KΩ es muy importante utilizarla entre la patilla de Gate y Source, para evitar que el Mosfet actue como una resistencia y se queme. Siguiendo el esquema anterior podemos…
1
Read More