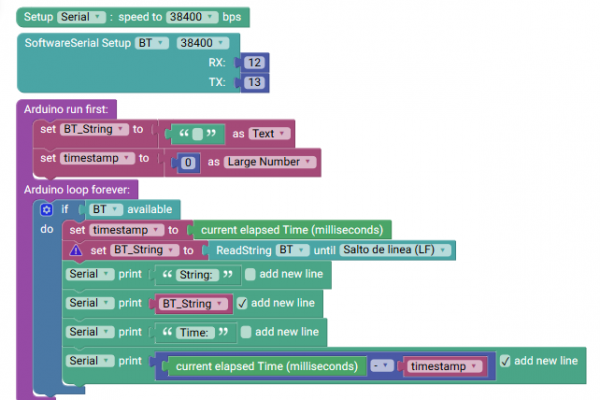
Differences between Read, ReadString and ReadStringUntil
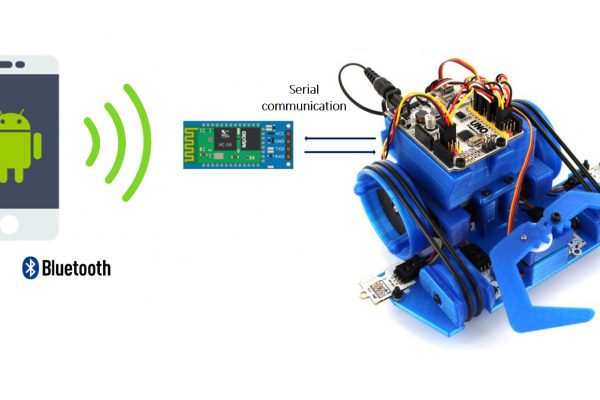
Desde nuestro monitor serie disponemos de un cable para enviar información y otro para recibirla. En la gran mayoría de casos se envía información para conocer el estado de las variables dentro de un programa para poder conocer como se gestionan durante la ejecución del mismo. Pero muy pocas veces se utilizan para leer datos a menos que creemos una comunicación Bluetooth para recibir datos de otro dispositivo. Como en cualquier comunicación bidireccional nos interesa que los datos quese intercambian…
0
Read More