Cómo procesar muchos datos para controlar tu robot por Bluetooth
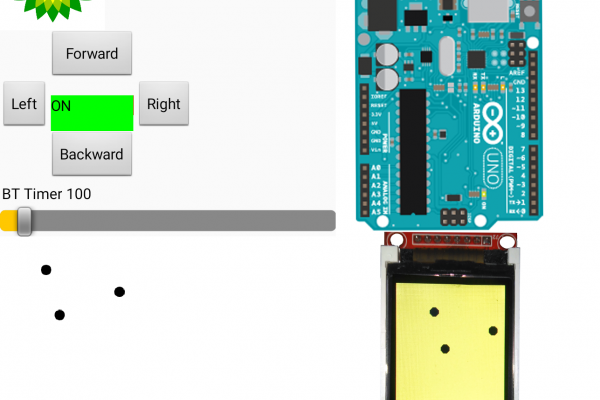
En estos momentos ya sabremos hacer un montón de cosas con nuestras aplicaciones. Mandar un texto, mandar un número, definir instrucciones con un conjunto de datos. En fin, se podría decir que estamos empezando a crear un protocolo de comunicaciones personalizado. En el post anterior nos quedamos con la forma de enviar datos desde nuestro robot a nuestras aplicaciones por Bluetooth. Ahora vamos a extender este apartado enviando datos a nuestroo robot, pero atendiendo a un caso muy especial. Vamos…
1
Read More