StrandBeest es un mecanismo creado por el artista Theo Jansen; o como se le prefiere denominar; escultor cinético.
Es decir, en lugar de pintar un punto negro en medio de un lienzo en blanco para venderlo por una absurda e ingente cantidad de dinero; lo que hace es crear mecanismos animados que imitan el movimiento articular de los animales. Es un arte en el que se une la ingeniería y con ello aplica la teoría de la física a una nueva creación novedosa y original.
Seguramente muchos lo recordarán del mítico anuncio de BMW, en el que explica el arte de transformar la fuerza del viento en movimiento.
Aquí quiero exponer un mini-tutorial de cómo podemos crear este mismo modelo impreso en 3D de forma sencilla y este es el resultado:
Piezas
Las piezas de este modelo, aunque hay varios se pueden descargar de la siguiente página.
http://www.thingiverse.com/thing:61871
Este modelo creado por Robert Swarner, ha diseñado las piezas compatibles con el juego de LEGO.
Materiales
Otras materiales adicionales son los tornillos que se van a utilizar. En las instrucciones ya explica cuales son los utilizados pero no se entiende un pimiento y la manía de utilizar pulgadas en lugar de mm exaspera.
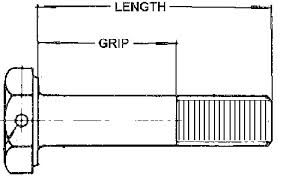
Además utilizar un tornillo con rosca en una articulación no es nada recomendable, por ello los tornillos elegidos son de cuello liso (Grip) para lel giro libre terminados en rosca para el apriete de tuerca.
- Metrica 3, osea diametro de 3mm. (M3)
- Tornillo Allen. (Socket Head Cap Screw).
- El cuello o Grip se define como “partially Threated” de 10 mm.
En la siguiente página se puede encontrar un catálogo de este tipo de tornillas con su norma correspondiente. Bossard Head Cap Screws.
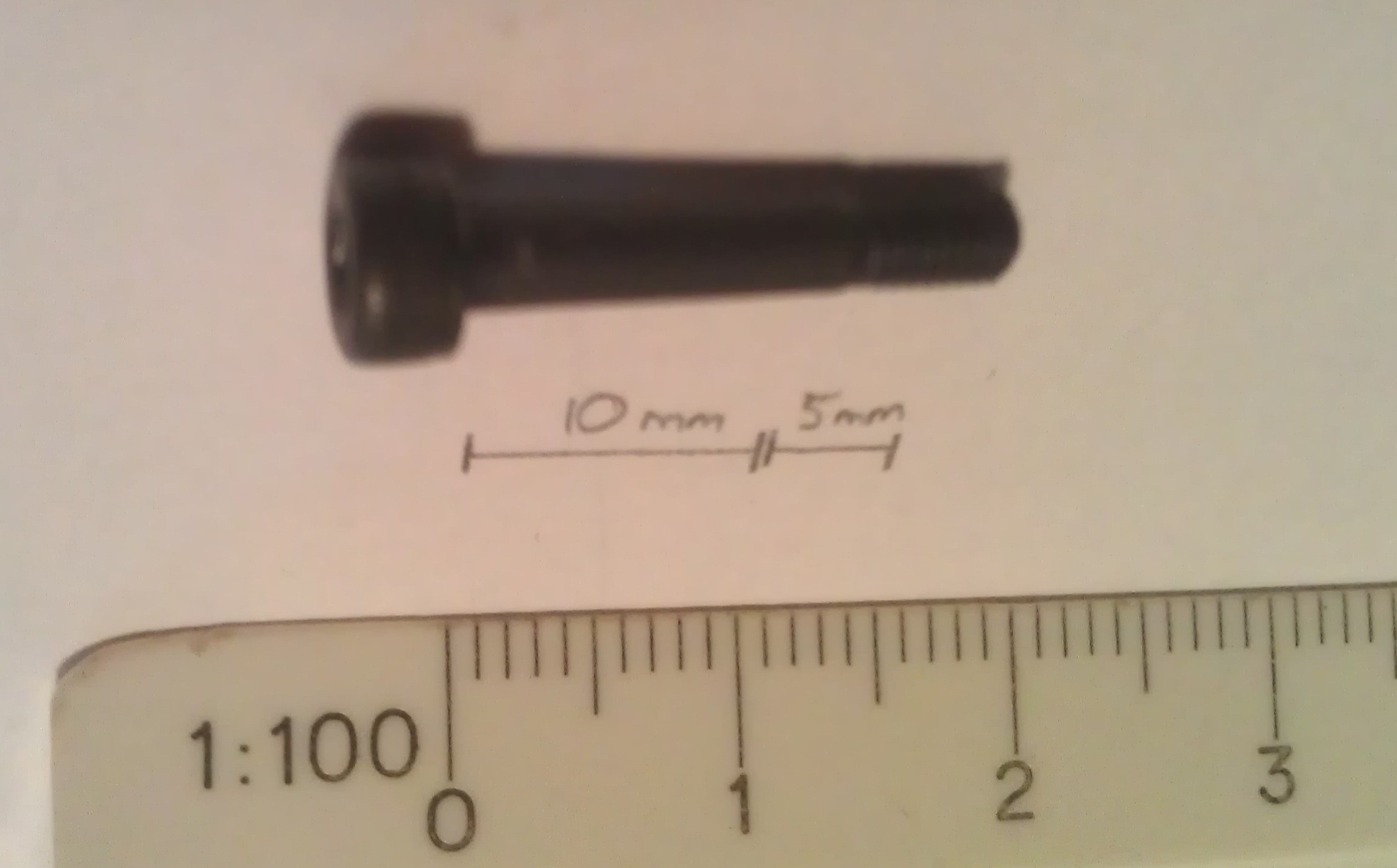
Es algo difícil de encontrar, ya que este tipo de tornillos tienen una rosca mínima de 18mm y no requerimos de tanto. Un tornillo demasiado largo puede impedir el movimiento del mecanismo. Por ello recomiendo escoger un tornillo con cuello suficiente y cortar la rosca sobrante a unos 5mm como en la foto.
Para el montaje serán necesarios 10 de estos tornillos. Por ejemplo, cualquiera de estos tipos:
- Din 912/ISO 4672, BN 613 M3x30.
- Din 912/ISO 4672, BN 2 M3x30.
- Din 912/ISO 4672, BN 4 M3x30.
- Din 912/ISO 20240, BN 20240 M3x30.
Además necesitaremos 3 tornillos más largos. En mi caso he elegido del mismo tipo que los anteriores de 35 cm. Así que se podrían utilizar los mismos de antes, pero en lugar de M3x30, escoger un par de M3x35.
Finalmente 4 tornillos para enganchar la capa del eje de giro. Estos son más normales y con un tornillo de estrella M3x5mm es más que suficiente.
NOTA PARA PRINCIPIANTES: A la hora de cortar los tornillos aseguraos de que la tuerca entra limando la punta por los bordes muy finamente.
El coste de estos tornillos es de 9 cent cada uno, así que si váis a hacer muchos de estos cacharros recomiendo comprar al por mayor. 😛
Montaje
Para montar el modelo tendremos la siguiente lista de piezas.
Estas cuatro constituyen el cuerpo central de giro, aquí se conecta el motor que hace girar el mecanismo.
1 x Body Back Shell –> Soporte fijo de giro.
1 x Body Cap –> Tapa atornillada a “Body Back Shell”.
1 x Crank –> Pieza circular que gira en el interior de “Body Back Shell”.
1 x Body End.
Las piezas triangulares son estas cuatro y son muy parecidas, se pueden imprimir ocho de un tipo y funciona igual.
2 x PelvisHipA
2 x PelvisHipB
2 x KneeFootA
2 x KneeFootB
Las siguientes piezas son barras que unen las anteriores entre si y permiten el movimiento.
4 x KneeToHip –> Barras que unen las piezas triangulares que conforman las patas del modelo.
2 x PelvisToC –> Barras más pequeñas que unen la rodilla de la pata con el eje principal de giro.
2 x BackOfLegToC –> Barras más grandes que unen el pie con el eje principal de giro.
Piezas auxiliares.
4 x Claw-Grooved.
1 x Washer.
Programación Arduino.
El código utilizado es el siguiente. Se mueve con un servomotor en el Pin 2, utilizando la librería Servo de Arduino. Se le ha añadido un pulsador en el Pin 6 y cuando se pulsa gira en dirección contraria.
#include <Servo.h>
Servo servo_2;
//
void setup()
{
pinMode(6, INPUT_PULLUP);
servo_2.attach(2);
}
void loop()
{
if (!digitalRead(6)) {
servo_2.write(0);
delay(20);
} else {
servo_2.write(0);
delay(20);
}
}
Cuando lo hayamos montado y programado tendremos un mecanismo como el siguiente GIF animado.
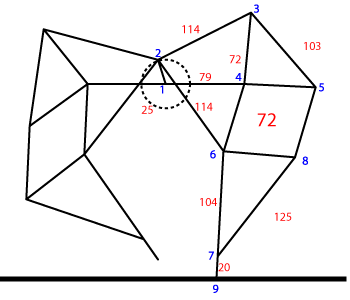
Un aspecto MUY IMPORTANTE a tener en cuenta es que no podemos escalar las piezas para hacerlo más pequeño o más grande, ya que su movimiento sigue unas reglas geométricas que relacionan las distancias de las barras con las posiciones de las articulaciones. Así que es muy posible que no nos funcione si lo hacemos el doble de grande con las piezas descargadas.
Para ello hay un script con OpenSCAD que genera las piezas de forma paramétrica por si se quiere hacer más o menos grande en el siguiente link.