
OnShape es un programa online que proporciona las facilidades de un programa de diseño paramétrico avanzado. A semejanza de Solidworks, se basa en la creación de croquis sobre planos de referencia y la aplicación de distintas operaciones para generar sólidos 3D que se pueden relacionar unos con otros hasta crear un modelo avanzado.
Este programa es quizás lo más avanzado hasta ahora para crear diseños de ingeniería sin necesidad de una licencia o descargar gigas de una versión pirata o desactualizada de cualquier amigo. Es necesario registrarse, y te permiten un espacio privado de 100MB para realizar tus creaciones.
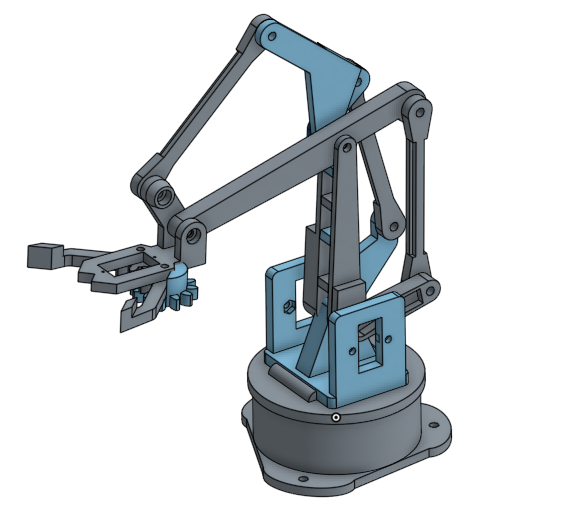
En este caso, he desarrollado un ejemplo de brazo robótico dentro de esta plataforma; y ya ocupa 82 MB; basado en un modelo de Thingiverse. De esta manera se pueden desarrollar las piezas con diferentes medidas y así tener la libertad de configurar este brazo para diferentes usos.
Se pueden crear distintos modelos de piezas, engranajes, ensamblajes, planos, establecer relaciones y restricciones. En fin, todo lo necesario para desarrollar todo tipo de diseños.
Para este brazo robótico se requiere de 4 miniservos, 16 tornillos M3x20, un tornillo M3x30 y un tornillo M4x24. Después se puede hacer uso de una placa programable Arduino para ejecutar los distintos movimientos a realizar.
Todo este sistema se basa en la creación de barrás con articulaciones que utilizan la rotación de los servomotores para su movimiento.
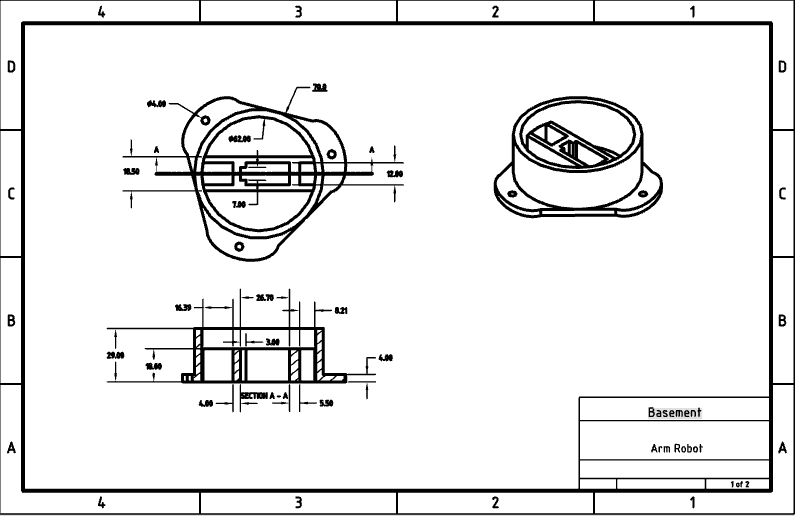
El primer servomotor está alojado dentro de la base que permite una rotación en su eje Z y define una primera orientación. Existe otro miniservo en el efector final que accionadas con unos engranajes , se mueven unas pinzas que se utilizan para agarrar un objeto.

Lo otros dos miniservos se alojan en sus laterales y su rotación realiza los movimientos de posicionamiento del efector final. El estudio cinemático de estos dos miniservos puede ser el más complejo para comprender como se posiciona el efector final. Por una parte hay que establecer relaciones geométricas y fórmulas para llegar a establecer el modelo y desarrollar la cinemática inversa del sistema.
Por otra parte, las barras que incorporan tienen una dependencia que delimita los límites de alcance del efector final; por lo que no es un sistema completamente libre; ya que solo dispone de 3 grados de libertad; ya que uno solo es el de apertura y cierre de la pinza.
Aunque pueda parecer complicado, es un ejercicio estupendo de estudio en el que se integran varios conceptos. Se pueden exportar las piezas fácilmente para su impresión 3D y proporciona un modelo de brazo simplificado y divertido de montar.